NAO
Présentation
 NAO est un robot d'environ 60cm et d'à peu près 5kg, développé par la start up française ALDEBARAN Robotics. Il a été présenté pour la première fois au public fin 2006 et était sélectionné dès 2007 pour remplacer le chien robot Aibo dont Sony venait d'arreter le développement comme plateforme standard de la RoboCup, compétition annuelle présentée comme étant la Coupe du Monde de Robotique. Six prototypes se sont succédés, de AL-01 en janvier 2005 à AL-05.b en décembre 2007, avant la sortie d'une première version standard de NAO, livrée fin mars 2008 et produite spécialement pour la RoboCup 2008, la NAO RoboCup Edition.
NAO est un robot d'environ 60cm et d'à peu près 5kg, développé par la start up française ALDEBARAN Robotics. Il a été présenté pour la première fois au public fin 2006 et était sélectionné dès 2007 pour remplacer le chien robot Aibo dont Sony venait d'arreter le développement comme plateforme standard de la RoboCup, compétition annuelle présentée comme étant la Coupe du Monde de Robotique. Six prototypes se sont succédés, de AL-01 en janvier 2005 à AL-05.b en décembre 2007, avant la sortie d'une première version standard de NAO, livrée fin mars 2008 et produite spécialement pour la RoboCup 2008, la NAO RoboCup Edition.
Outre la RoboCup, NAO est utilisé pour luter contre l'autisme, comme outil d'enseignement et comme plateforme de recherche par plus de 450 universités et laboratoires du monde entier, dans des domaines aussi vastes que les sciences-sociales, les interractions homme-machine,l'informatique et la robotique.
caractéristiques
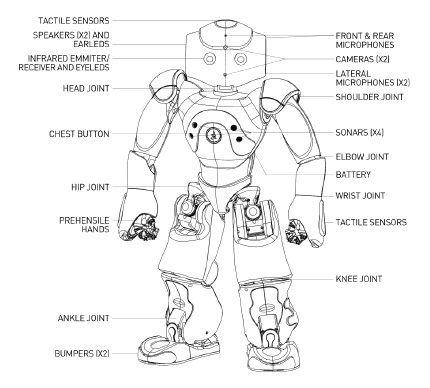
| Hauteur | 58 cm |
| Poids | 4,8 kg |
| Autonomie | 90 min |
| Degrés de liberté | 14 à 25 |
| Processeur | Intel ATOM 1,6 GHz(V4) ou AMD Geode 550 Mhz (V3.3...) |
| Système d'exploitation intégré | Linux |
| Systèmes d'exploitation compatible | Windows, Mac OS, Linux |
| Langages de programmation | C++, Python, Java, MATLAB, Urbi, C, .Net |
| Connectivité | Ethernet, Wi-Fi (b,g,n) |
| vision | 2 caméras 920p, 30ips (non activable simultanément) |
| Audio | 4 Microphones |
anecdote
Actuellement, NAO est engagé sur le Vendée Globe à bord d'Initiative Coeur de Tanguy de Lamotte. Vous pouvez suivre ses aventures sur initiative-coeur.fr.
 ASIMO est un robot développé par Honda et dévoilé en 2000. Il est le fruit de 26 ans de travail depuis la conception du premier robot de Honda, le E0 en 1986. ASIMO, dont la cinquième version est sortie en 2011, est actuellement l'androïde le plus abouti jamais construit, tant du point de vu de l'intelligence artificielle, il est en effet capble de s'adapter partiellement à son environnement (éviter quelqu'un qui marche par exemple), de travailler en collaboration avec d'autres robots ASIMO, guider et corriger la trajectoire d'un chariot de 10 kg, maintenir horrizontal un plateau pendant la marche et bien sur de reconnaissance faciale et vocale, que du point de vue mécanique, il est ainsi capable de courir à une vitesse de 9km/h en ligne droite (le record du monde des robots bipèdes est actuellement de 11km/h), de monter et descendre un escalier ou encore de danser.
ASIMO est un robot développé par Honda et dévoilé en 2000. Il est le fruit de 26 ans de travail depuis la conception du premier robot de Honda, le E0 en 1986. ASIMO, dont la cinquième version est sortie en 2011, est actuellement l'androïde le plus abouti jamais construit, tant du point de vu de l'intelligence artificielle, il est en effet capble de s'adapter partiellement à son environnement (éviter quelqu'un qui marche par exemple), de travailler en collaboration avec d'autres robots ASIMO, guider et corriger la trajectoire d'un chariot de 10 kg, maintenir horrizontal un plateau pendant la marche et bien sur de reconnaissance faciale et vocale, que du point de vue mécanique, il est ainsi capable de courir à une vitesse de 9km/h en ligne droite (le record du monde des robots bipèdes est actuellement de 11km/h), de monter et descendre un escalier ou encore de danser.